NeuralCamouflage
Inpainting to hide structures in satellite images
Neural Camouflage
I recently generalized this computer vision model to forecast time series (link to the repo).
Introduction
Google Earth made sophisticated satellite images accessible to anyone with a digital device and internet connection. However, sensitive locations, which used to be well hidden from the public, were fully exposed. Thus, easy access to satellite images poses a potential threat to national security and personal privacy.
On the one hand, it is necessary to completely hide details in secret facilities. Usually those locations are censored with single-color or pixelation patches which do not blend in with surrounding structures. On the other hand, such “cover-ups” often raise people’s curiosity and attract more public attention (check out this blog post).
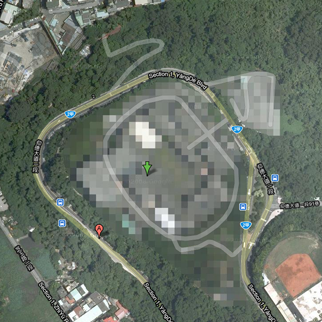
To tackle this delimma, I applied the technology of photo retouching to satellite images where the sensity structures were replaced by textures mimicing the surrounding structures. This process was automated using a dense partial convolutional neural network.


My Model
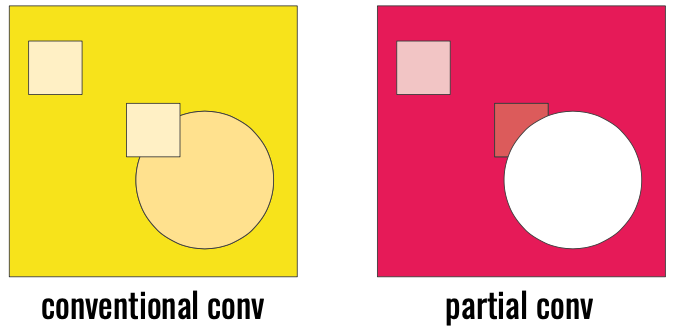
The architecture is a modified version of UNet where the encoding convolutional layers are replaced by partial convolutional layers together with partial batch normalization. The partial convolution layer takes (i) an image (or its feature map) with a hole, and (ii) the mask indicate the location of the hole; the output is a partial convolution feature map skipping the hole region and the mask for the remaing hole in the feature map.
Partial Convolution Layer
class PartialConv2d(in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1, bias=True, eps=0.1)
Parameters:
- in_channels (int) – Number of channels in the input image
- out_channels (int) – Number of channels produced by the convolution
- kernel_size (int or tuple) – Size of the convolving kernel
- stride (int or tuple, optional) – Stride of the convolution. Default: 1
- padding (int or tuple, optional) – Zero-padding added to both sides of the input. Default: 0
- dilation (int or tuple, optional) – Spacing between kernel elements. Default: 1
- groups (int, optional) – Number of blocked connections from input channels to output channels. Default: 1
- bias (bool, optional) – If
True, adds a learnable bias to the output. Default:True - eps (float, optional) – The confidence threshold for new mask, i.e.
new_mask = AvePool2d(mask.float())>eps. Default:eps=0.1
Shape:
- Input: image
(batch, in_channel, height, width)and mask(1, 1, height, width) - Output: feature map
(batch, out_channel, new_height, new_width)and mask(1, 1, new_height, new_width)
Variables:
- weight (Tensor) – the learnable weights of the module of shape (out_channels, in_channels, kernel_size[0], kernel_size[1])
- bias (Tensor) – the learnable bias of the module of shape (out_channels
Partial Convolution Block
class PConvBlock(in_channel, out_channel, conv_para, pool_para, eps=0.1)
The input image and mask are passed to partial convolution and then partial batch normalization (avoiding the hole region). The output feature map is then passed to a ReLU layer and MaxPool2d layer; the mask is downsampled with the same MaxPool2d layer.
Parameters:
- in_channels (int) – Number of channels in the input image
- out_channels (int) – Number of channels produced by the convolution
- conv_para (dict) – Parameters of partial convolution layer
- pool_para (dict) – Paramters of max-pooling layer, see class
torch.nn.MaxPool2d
Shape:
- Input: image
(batch, in_channel, height, width)and mask(1, 1, height, width) - Output: feature map
(batch, out_channel, new_height, new_width)and mask(1, 1, new_height, new_width)
Variables:
- weight (Tensor) – the learnable weights of the module of shape (out_channels, in_channels, kernel_size[0], kernel_size[1])
- bias (Tensor) – the learnable bias of the module of shape (out_channels)
Partial Convolution Network
class PConvNet(n_hidden=8)
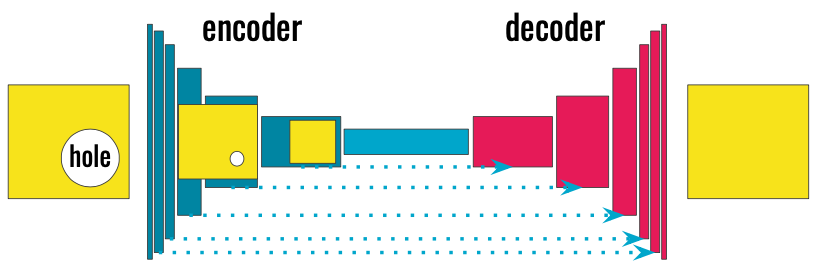
There are 8 partial convolution blocks PConvBlock downsampling the images, and 8 transposed convolution blocks reconstructing the images. Each transposed convolution is composed of the following:
torch.nn.ConvTransposed2dfunctions as reverse oftorch.nn.MaxPoolin the mirroring partial convolution block.torch.nn.BatchNorm2d2D Batch Normalizationtorch.nn.ConvTransposed2dfunctions as reverse ofPartialConv2dtorch.nn.ReLUReLU layer- Concatinate the feature maps of the mirroring
PConvBlockto the output of ReLU layer - Compress the concatinated feature maps using 1x1 convolution
torch.nn.Conv2d
Shape:
- Input: image
(batch, in_channel, height, width)and mask(1, 1, height, width) - Output: image
(batch, in_channel, height, width)
Examples
The original images are samples from Paris-SpaceNet
| Camouflage | Original |
|---|---|
 |
 |
 |
 |
 |
 |
Requirements
- Python 3.5+
- PyTorch 0.4
- Numpy
- OpenCV